Broszka Arduino można ocenić do 5V i 40mA który jest niewystarczający do napędzania silnika. W związku z tym konieczne będzie zintegrowanie sterownika w celu wzmocnienia prądu i przystosowania panelu do pracy silnika.
Jeśli chcesz wiedzieć, jak go zaprogramować, przeczytaj poniżej. Wyjaśnimy, jaki rodzaj silnika możesz zaprogramować i jakich modeli powinieneś używać.
Ale to nie wszystko, znajdziesz tu również kroki, które musisz wykonać, aby zaprogramować silnik od podstaw. Nie przegap niczego i zacznij od najlepszych zmotoryzowanych projektów ten
Czy silnik można zaprogramować na dowolnym panelu Arduino?
Panel Arduino nie ma wystarczającej mocy do poruszania silnikiem (jak wspomniano we wstępie do pierwszych linijek tego artykułu), więc potrzebujesz wzmacniacza umożliwiając ruch siłownika. Odciski palców są niezbędne do tworzenia ekranów silniki które możesz wykorzystać w środku Arduino jest tam Typ DC, serwomotor, bezszczotkowy silnik prądu stałego, sterownik L293D, sterownik L298, płytka wyciekowa L298N, silnik ostrza ten Ta lista zawiera wzmacniacze prądowe, które umożliwiają prawidłową pracę siłowników.
Rodzaje silników do wykorzystania w Arduino Co to jest?
Możesz wybierz następujące silniki do swoich projektów używane w Panel Arduino.
Poznaj każdego z nich w ich danych kontaktowych:
lekarz silnika
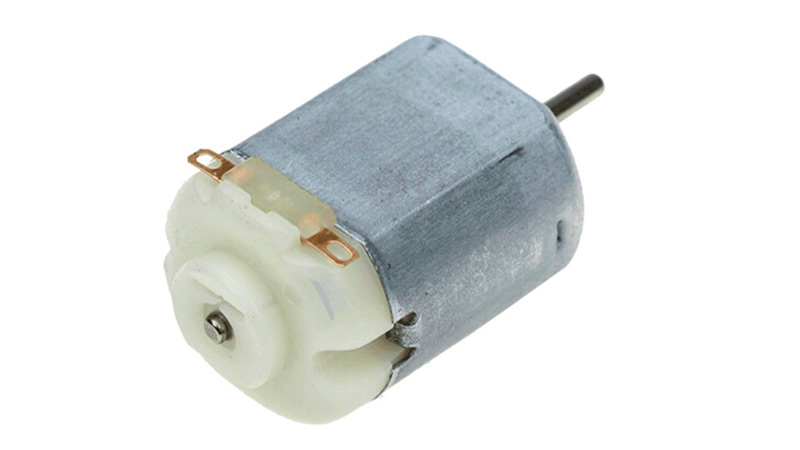
Jest to silnik prądu stałego , nazywany również DC, ponieważ jest prądem stałym. Jego główną cechą jest zamiana energii elektrycznej na mechaniczną dzięki: pole magnetyczne ten Oznacza to, że silnik obraca się w sposób ciągły w obu kierunkach, jeśli zmienia się polaryzacja prądu.
Składa się ze stojana ? służy do tworzenia słupów i jest zwykle wykonany z magnesów lub drutów miedzianych. i przez wirnik ten Ostatnim elementem jest ten, który otrzymuje prąd stały i jest wykonany w formie cylindrycznej z grafitu lub innych stopów. Jego głównym zastosowaniem są silniki liniowe, silniki krokowe i serwomotory. Bardzo często można je znaleźć w zabawkach ponieważ ich prędkość można kontrolować.
Uruchamiacz
Siłownik to specjalny typ silnika służący do utrzymywania wału w miejscu W ten sposób mogą obrócić się o 180° lub o pełny obrót. Charakteryzuje się wysokim momentem obrotowym produkowane przez jego potencjometr to działa z silnikiem prądu stałego i służy do poruszania zębatkami.
W związku z tym, serwomotor to skrzynka składająca się z panelu Arduino , potencjometr, silnik prądu stałego i przekładnie. Stosowany jest głównie w robotyce, więc można go zobaczyć w fabrykach, zabawkach, a nawet w windach.
Sterownik L293D
Działanie tego urządzenia opiera się na: steruje innymi silnikami dzięki czemu idealnie nadaje się do projektów Arduino. Może działać na 4 silnikach prądu stałego lub 2 silnikach krokowych lub jeśli wolisz 2 serwomotory ten Oznacza to, że może być ich kombinacja, na co pozwalają twoje bloki zacisków. Łącznie z Obwody 4 atom , możesz kontrolować, jakie obciążenie otrzyma każdy silnik.
Może być używany na panelu Arduino UNO zgodnie z następującymi pinami:
- Cyfrowe Cyfrowe 3 – PWM_Motor2
- Cyfrowy 4 – DIR_CLK
- Cyfrowy 5 – PWM_Motor4
- Cyfrowy cyfrowy 6 – PWM_Motor3
- Cyfrowe Cyfrowe 7 – DIR_EL
- Cyfrowy 8 – DIR_SER
- Cyfrowy 9 – Serwo_1
- Cyfrowy 10 – Serwo_2
- Cyfrowe Cyfrowe 11 – PWM_Motor1
- Cyfrowy 12 – DIR_LATCH
Pilot zdalnego sterowania L298
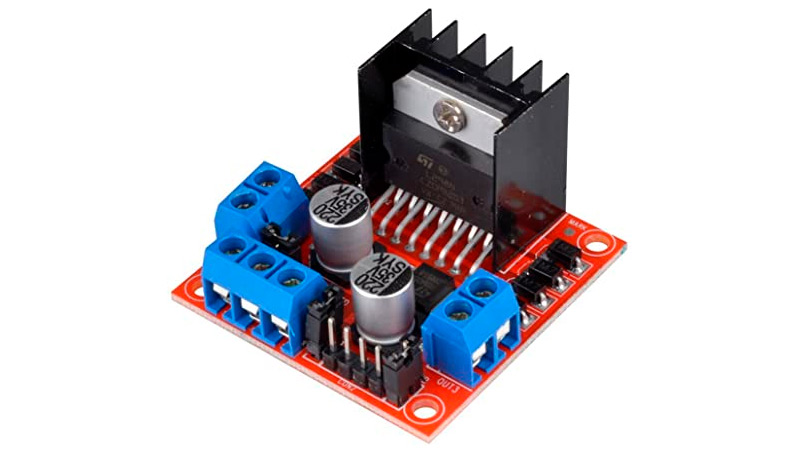
Ten składnik odpowiada za kontrolę prędkości i kierunku, w jakim obracają się silniki podczas skręcania. Jest kompatybilny z szerokim zakresem temperatur kreacja, 20°C do +135°C ten Prąd wyjściowy generowany na kanał może wynosić do 2 ampery ten
Połączenie pinów jest następujące:
- Pin IN1 – SILNIK A
- Pin IN2 – SILNIK A
- Pin IN3 – SILNIK B
- Pin IN4 – SILNIK B
- Kadłub JEDEN – PWM
- Przypnij ENB – PWM
Bezszczotkowy silnik prądu stałego
Jest również znany jako silnik bezszczotkowy, ponieważ nie wymaga pierścieni ślizgowych produkować zmiany polaryzacja. Charakteryzuje się lekki nie wymagają dużo utrzymanie oraz być tańsze w kosztach produkcji ten
La złożoność jego działania ostatnio odmówił, co czyni go szeroko stosowanym narzędziem w technologii. Znaleźć poprawna polaryzacja, Wykrywanie pola magnetycznego odbywa się za pomocą wirnika. Jego mechanizm znajduje się na płytach odtwarzaczy DVD i chłodnic płyt.![]()
O czym powinienem pamiętać wybierając idealny silnik do mojego projektu Arduino?
Zanim wybierzesz silnik do swojego projektu Arduino, powinieneś wziąć pod uwagę następujące czynniki:
- Szybkość czasu rotacji. Innymi słowy, musisz zinterpretować, jaka jest optymalna prędkość, jakiej potrzebuje Twój silnik dla Twojego projektu.
- Siła przyłożona do masy nazywany również Para w silnikach obrotowych. Musisz zastanowić się, czy ciężar przedmiotu, który chcesz przesunąć, jest większy czy mniejszy niż przemieszczenie, z jakim powinien poruszać się silnik.
- Możliwość dostarczenia ładunku elektrycznego. Innymi słowy, musisz wziąć pod uwagę ilość energii, jaką silnik jest w stanie wyzwolić w danym momencie.
- Maksymalna pojemność robocza. Jest to związane z obciążeniem, jakie silnik musi pracować bez zerwania z powodu wysiłku, jaki wykonuje.
- Poziom dokładności Jest to kolejny czynnik, który należy wziąć pod uwagę, ponieważ ruchy, których będziesz potrzebować w swoim projekcie, mogą wymagać różnych stopni dokładności.
- Napięcie zasilania. W dziale elektroniki ważne jest, aby wiedzieć, że silnik pracuje na różnych napięciach, więc płytka Arduino musi oferować takie samo napięcie znamionowe.
- Prąd znamionowy. Ta pozycja odnosi się do ilości prądu wymaganego do uruchomienia silnika. W celu określenia rozsądnych wartości roboczych należy wziąć pod uwagę rezystancję i napięcie znamionowe.
- Energia pochłaniana przez silnik w każdej chwili. Nazywa się to elektrycznością i mierzy ogólną wydajność silnika na płycie Arduino.
Oprócz cen wymienionych powyżej, musisz wziąć pod uwagę Wymiary silnik, aby sprawdzić, czy pasuje do Twojej lokalizacji, wierzchowce , waga i termin przydatności do spożycia m.in. Rozumiemy przez to, że aby wybrać idealny silnik do swojego projektu Arduino, Należy wziąć pod uwagę wiele czynników ponieważ ty może znaleźć siłownik, który ma wyższą wartość niż inny, co nie znaczy, że jest najlepszy lub odpowiedni dla Ciebie.
Dowiedz się krok po kroku, jak zaprogramować silnik Arduino od podstaw
Aby zaprogramować bezszczotkowy silnik prądu stałego na Arduino ze zmianą prędkości i obrotów, należy to zrobić krok po kroku:
Złóż wszystkie komponenty
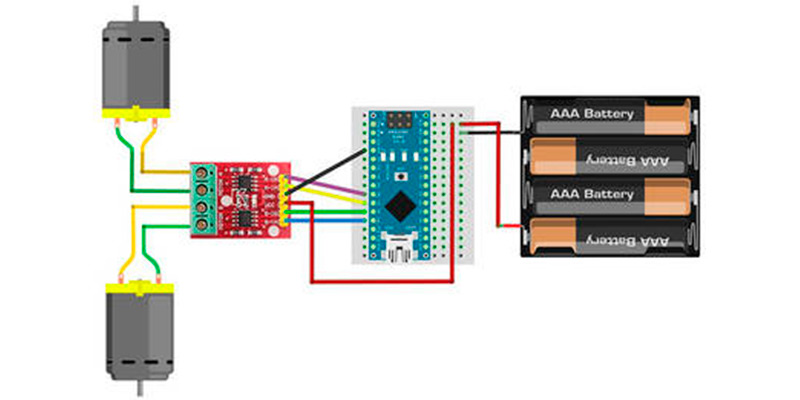
Pierwszą rzeczą, którą musisz zrobić, to podłącz Arduino do kontrolera, następnie baterię do kontrolera i baterię do silnika. ten Nie wolno nam zapominać, że trzeba to wszystko przymocować za pomocą kabli. Możesz wybrać rodzaj zasilania, który chcesz, np. 5 lub 12 woltów. W tym celu będziesz musiał użyć zworki, aby uzyskać bezpośredni dostęp do panelu Arduino. Więc powinieneś połączyć piny 3 i 4 z żeńskimi końcówkami kabla, których użyłeś.
Przypisz cewki do pinów
„UPDATE” Czy chcesz zaprogramować silnik dla swojego projektu Arduino bez błędów? ⭐ ODWIEDŹ TUTAJ ⭐ i dowiedz się wszystkiego o SCRATCH! „
Wiedząc, że silnik krokowy ma maksymalny moment obrotowy czyli wykorzystuje 2 cewki na każdym etapie, osiągając maksymalne zużycie. niższy moment obrotowy ponieważ możesz wybrać jedną cewkę na raz i mieć umiarkowane zużycie. i ruch półkrokowy co jest kombinacją dwóch sytuacji. Następnie konieczne będzie dopasowanie cewek do pinów.
W tym celu powinieneś użyć:
- Pin 8 – MAM JEDEN
- Pin 9 – STRESZCZENIE B.
- Pin 10 – CEWKA C
- Pin 11 – CEWKA D
Zaprogramuj silnik
Będziesz go teraz potrzebował ręczne programowanie silnika ten
Dlatego musisz kontynuować konfigurację i wykonać następujące kroki, aby uzyskać normalny ruch:
* / #define IN1 8 #define IN2 9 #define IN3 10 #define IN4 11 krok wewn [4] [4] = { {1100}, {0}, {0}, {1, 0, 0, 1} }; pusta konfiguracja () { pinMode (WE1, WYJŚCIE); pinMode (WE2, WYJŚCIE); pinMode (WE3, WYJŚCIE); pinMode (WE4, WYJŚCIE); } pusta pętla () { dla (int i = 0; ja <4; ja ++) { DigitalWrite (IN1, krok [i] [0]); DigitalWrite (IN2, krok [i] [1]); DigitalWrite (IN3, krok [i] [2]); DigitalWrite (IN4, krok [i] [3]); opóźnienie (10); } }
Kody do programowania najmniejszej pary to:
#define IN1 8 #define IN2 9 #define IN3 10 #define IN4 11 krok wewn [4] [4] = { {1}, {0}, {0}, {0, 0, 0, 1} }; pusta konfiguracja () { pinMode (WE1, WYJŚCIE); pinMode (WE2, WYJŚCIE); pinMode (WE3, WYJŚCIE); pinMode (WE4, WYJŚCIE); } pusta pętla () { dla (int i = 0; ja <4; ja ++) { DigitalWrite (IN1, krok [i] [0]); DigitalWrite (IN2, krok [i] [1]); DigitalWrite (IN3, krok [i] [2]); DigitalWrite (IN4, krok [i] [3]); opóźnienie (10); } }
Chociaż będziesz musiał wprowadzić te kody, aby silnik ruszył w pół kroku:
#define IN1 8 #define IN2 9 #define IN3 10 #define IN4 11 krok wewn [8] [4] = { {1}, {1100}, {0}, {0}, {0}, {0}, {0}, {1, 0, 0, 1} }; pusta konfiguracja () { pinMode (WE1, WYJŚCIE); pinMode (WE2, WYJŚCIE); pinMode (WE3, WYJŚCIE); pinMode (WE4, WYJŚCIE); } pusta pętla () { dla (int i = 0; ja <8; ja ++) { DigitalWrite (IN1, krok [i] [0]); DigitalWrite (IN2, krok [i] [1]); DigitalWrite (IN3, krok [i] [2]); DigitalWrite (IN4, krok [i] [3]); opóźnienie (10); } }
Najlepsze projekty motocykli Arduino, które możesz wykonać od podstaw
Najlepsze projekty motocykli Arduino można znaleźć na tej liście:
Bezszczotkowy silnik prądu stałego

Będziesz potrzebować Płytka Arduino Nano, typ R3 , następnie bezszczotkowy silnik prądu stałego oraz śmigła aby dotrzeć do siłownika.
Kody nadajników to:
# zawiera serwo esc; Oprogramowanie serii Hc12 (2, 3); // RX, TX int thr, czosnek, ele, ruda; pusty parametr () { krawat (10); pinMode (A0, WEJŚCIE); Seryjny. początek (9600); początek (9600); } pusta pętla () { thr = mapa (analogRead (A0), 0, 1023, 0, 180); drukuj (thr); Seryjny. drukuj (thr); opóźnienie (100); }
Musisz użyć następujących kodów programowania dla odbiornika:
# zawiera serwo esc; wpis ciąg; int akcelerator, th; pusty parametr () { krawat (10); Seryjny. początek (9600); początek (9600); napisz (170); opóźnienie (2000); napisz (90); opóźnienie (2000); napisz (140); opóźnienie (2000); napisz (90); opóźnienie (2000); } pusta pętla () { tak (Ciąg. dostępny ()) { motyl = Seria. odczytajCiągDo (' n'); if (długość wejściowa ()> 0) { pisać (akcelerator); opóźnienie (10); } } }
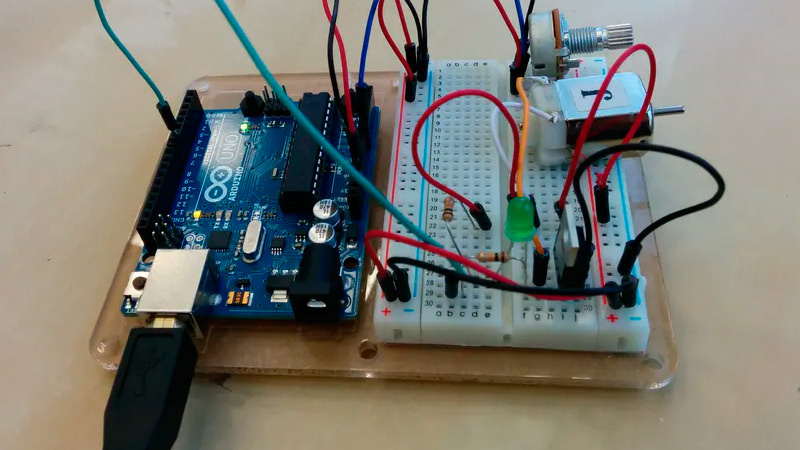
Silnik z potencjometrem
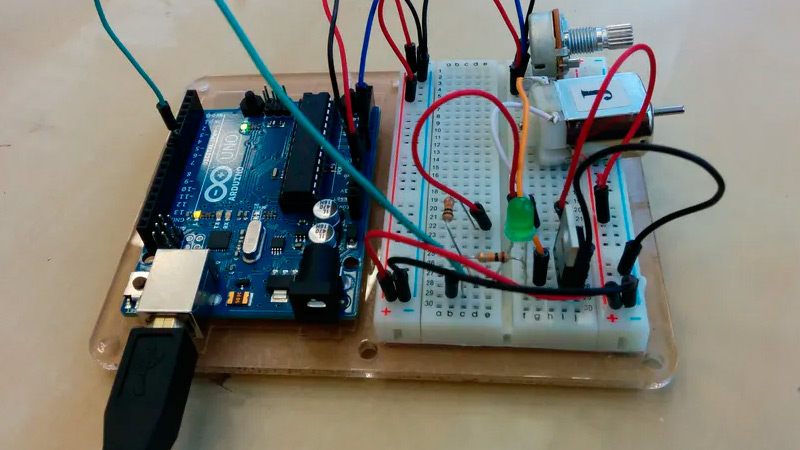
Szopa ten projekt ma Arduino potrzebować’ Arduino UNO, od Organizacja Narodów Zjednoczonych maszyna Organizacja Narodów Zjednoczonych potencjometr obrotowy, nadać cechy osobiste włóż płytę , Z opór 10KΩ PROWADZONY oraz kable.
Po załączeniu wszystkich szczegółów musisz wprowadzić te kody:
#zdefiniuj MOF_PIN 6 #define POT_PIN A1 pot int = 0; pusty parametr () { pinMode (MOF_PIN, OUTPUT); pinMode (POT_PIN, INPUT); Seryjny. początek (9600); } pusta pętla () { pot = odczyt analogowy (POT_PIN); Seryjny. println (łódź); analogWrite (MOF_PIN, pot / 4); }
Sterownik silnika L293D